
Das Thema Beleuchtung ist ja ganz interessant, hat einen hohen WAF, ist aber im Detail nicht immer einfach. In irgendeinem Forum stand was über zigbee2mqtt, damit kann man das ganze Zigbee Geraffel in MQTT einbinden, was das Handling enorm vereinfacht. Zusammengefasst: Zigbee macht Heimautomatisierung frauenfreundlich.
Der Clou an der Sache ist, dass man kein teueres Zigbee Gateway von Philips Hue, Ikea oder Xiaomi braucht, sondern einen 5 € Zigbee USB Adapter. Auf diesen Stick muss dann nur noch die richtige Firmware und fertig ist der Lack. Bei Ebay oder Ebay-Kleinanzeigen findet man auch schon Sticks mit der geflashten Firmware, das reduziert den Aufwand nochmal und die Software gibt es auch als Docker-Image. Wie man das Ganze dann mit einer Ikea TRÅDFRI Lampe zum Laufen bekommt ist dann noch hier beschrieben. Das Ganze ist schon erschreckend einfach. Nächster Halt: Lichtwecker für die Kids ihren Papa.
Heimautomatisierung
Großflashaktion

Man muss die Zeit ja irgendwie nutzen, irgendwas brauchbares machen, also wurde gestern alles geflasht was in den letzen Wochen und Monaten eingetroffen ist. Von links nach rechts: zwei Sonoff POW, vier Sonoff S20 und zwei Gosund SP1.
Die Sonoff POW muss man festverdrahten, eigentlich sollte damit der Stromverbrauch von Waschmaschine und Trockner gemessen werden, das erledigen aber mittlerweile die Gosund Teile.
Die Sonoff S20 kommen ans Aquarium, damit man beim Saubermachen den Filter bequemer ausschalten kann oder das UV-Licht
Mit den Gosund SP1 soll jetzt Stück für Stück überprüft werden welche Geräte wieviel Strom verbrauchen. Wir sind ja vom Ansatz her Ökos.
Das Ding ist, dass es die Gosund SP1 und die Sonoff S20 mittlerweile in neuen Versionen gibt und diese neuen sind verklebt, da lässt sich so einfach kein Tasmota mehr flashen, also noch ein Paar alte besorgt. Sicher ist sicher.
Heimautomatisierungsbasisoffensive, Teil 6 – Update!
Man kann so ein Docker-Image übrigens recht einfach aktuell halten:
sudo docker-compose up --force-recreate --build sudo docker image prune -f
Top!
Der CT-Lampen-Hack und seine leuchtenden Folgen bei den Hacks
 Beim 35C3 gab es einen Vortag von einem, der eine smarte LED Lampe gehackt hat, und damit in ein WLAN eingedrungen ist. Unterm Strich sind 2 Informationen hängen geblieben: Erstens gibt es smarte Lampen auf Basis von ESP8266 und zweitens sollte man deren Original-Firmware besser nicht verwenden.
Beim 35C3 gab es einen Vortag von einem, der eine smarte LED Lampe gehackt hat, und damit in ein WLAN eingedrungen ist. Unterm Strich sind 2 Informationen hängen geblieben: Erstens gibt es smarte Lampen auf Basis von ESP8266 und zweitens sollte man deren Original-Firmware besser nicht verwenden.
Wenn man nach „ESP8266 smart led lampe“ googelt, dann landet man irgendwann bei der Sonoff B1. SONOFF! Bei „Sonoff“ denkt der sicherheitsbewusste Heimautomatisierer sofort an „Tasmota“ und beginnt zu lächeln.
Wie es der Zufall will gibt es bei Youtube auch gleich die passende Anleitung wie man Tasmota auf eine Sonoff B1 kriegt. Machbar. Sonoff B1 mit der schlechten Firmware gibt es bei Reichelt für 23,95 €, gleich mit Tasmota für 23,90 € bei Ebay aus Deutschland oder 3 (!) für 25,62 € mit der schlechten Firmware bei Ebay direkt aus China (dafür aber mit gut 2 Monaten Lieferzeit). Und die hab ich gleich bestellt.
Was kann man damit machen? Blaues Licht zum Beispiel. Oder einen Tageslichtwecker. Oder eine Beleuchtung fürs kleine Aquarium. Oder eine maßgeschneiderte emotionale Illuminationslösung für die Chefin. Halt irgendwas cooles.
Heimautomatisierungsbasisoffensive, Teil 5 – Reihenfolge beachten
Obacht, kleines Update, der Remote Start Service darf natürlich erst gestartet werden wenn das System eine IP-Adresse hat. Auf Nummer Sicher geht man wenn man es z.B. nach Docker startet:
After=docker.service Description=Remote Start Schweizer Taschenmesser Service [Service] ExecStart=/home/christian/docker/smarthome/remote_start/remote_start.py [Install] WantedBy=default.target
Flexibel schalten und walten

Ein erster Schritt Richtung Chefinheimautomatisierungsintegration war es sie mit Meldungen zu versorgen wenn der Trockner bzw. die Waschmaschine fertig ist. Das kommt gut an. Jetzt kommt Schritt zwei, sie darf nämlich bald aktiv steuernd eingreifen und zwar gleich 6-fach. Wenn man da mal etwas recherchiert, dann finden sich recht schnell WLAN-Schalter, die man irgendwie integrieren kann, aber man muss aufpassen, i.d.R. ersetzten die nämlich nur Einzeltaster in Unterputzdosen, die fast nie zum eigenen Schalterprogramm passen.
Nach etwas hin und her wurde es jetzt ein 6-Fachschalter von Homematic, der schaut zwar auch scheiße aus und passt nicht zu Busch-Jäger Schaltern, aber er ist flach und braucht keine Unterputzdose, sondern kann einfach auf die Wand geklebt werden. Eigentlich ist der sau teuer, wie alles von Homematic, aber ELV verkauft sie auch als Bausatz, da kostet so ein Schalter dann statt 70 € nur 45 €. Der Zusammenbau beschränkt sich auf 8 Lötpunkte und etwas Plastikbausatzgedöns und dauert keine 10 Minuten. Das Ergebnis ist zwar hässlich, funktioniert aber und kann ja notfalls in den Küchenschrank gepappt werden. Läuft.
Heimautomatisierungsbasisoffensive, Teil 5 – der eigene Service
Die Lösung etherwake über SSH auf dem Host zu starten hat mir überhaupt nicht gefallen, vor allem weil man sie bei jeder Änderung am FHEM Image manuell nachziehen musste. Jetzt gibt es eine wirklich smarte Lösung, nämlich einen RemoteStart Dienst via HTML Schnittstelle, eingehangen in Systemd. Hört sich kompliziert an, ist aber relativ einfach.
Bottle, den Mini-Webserver in Python, hatte ich vor einem Jahr schon mal für die Aquariumsteuerung verwendet. Jetzt lauscht er auf Port 8080 vom Host und wartet dass ihm jemand aufruft (Zeile 14). Standardmäßig gibt er ein Smily zurück (Zeile 10-12). Ruft man aber den Pfad /startServer (Zeile 6) macht er einen Systemaufruf und versendet das Magic Paket (Zeile 8). Fertig ist der Lack:
#!/usr/bin/python
import os
from bottle import route, run, template
@route('/startServer')
def startServer():
return os.system("/usr/bin/wakeonlan 30:9c:23:46:36:xx")
@route('/')
def hello():
return ':-)'
run(host='192.168.178.3', port=8080)
Damit der Server auch bei jedem Neustart automatisch gestartet wird, muss man einen Systemd-Service einrichten. Dazu legt man eine kurze Service-Konfiguration an sudo vim /etc/systemd/system/remoteStart.service, das war es dann auch schon:
After=network.target [Service] ExecStart=/home/christian/docker/smarthome/remote_start/remote_start.py [Install] WantedBy=default.target
Sau coole Geschichte! Jetzt überlege ich schon was man damit noch anstellen könnte, das ist ja so eine Art Schweizer-Taschenmesser-Panzertape-MacGyver-Nummer in Code gegossen.
Heimautomatisierungsbasisoffensive, Teil 4 – das Haar
Es hat ein ganzes Stück gedauert um ein Haar in der Docker-Suppe zu finden, jetzt ist es so weit: Irgendwie kann man aus einem Docker-Container heraus kein WakeOnLan Magic Packet versenden. Und das trifft eines der coolsten FHEM/Telegram Features, nämlich dass man den Backup-/Seafile-Server von unterwegs in sage und schreibe 4 Sekunden aus den Standby zum Laufen bekommt.
Durch einen Umweg, von hinten mit dem Messer durch die Brust, geht es allerdings doch: Wenn mit Telegram der Befehl zum Starten rein kommt, dann startet FHEM im Container nicht mehr etherwake direkt, sondern loggt sich auf dem Host per ssh ein und startet es dort. Die Lösung ist nicht wirklich sauber und verstößt wahrscheinlich gegen die reine Docker-Lehre, funktioniert aber prima!
Heimautomatisierungsbasisoffensive, Teil 4 – DevOps@Home

Seit Donnerstag ist der neue Rechner online und der Raspberry aus. Der Wechsel hat, abgesehen von ein paar Kleinigkeiten, eigentlich reibungslos geklappt. Das System ist pfeilschnell, Ziel erreicht! Und noch viel mehr: alles läuft in Docker-Containern, auf btrfs, mit Snapshots bei Updates und seit heute mit Git verwaltet auf einem eigenen Gitea-Server eingecheckt.
Die letzte Woche war nicht nur sehr lehrreich sondern auch kräftezehrend, mehr als 5 Stunden Schlaf waren es nie, dafür viel zu viel Kaffee. Aber das Ergebnis kann sich sehen lassen. DevOps@Home, so viel IT gab es hier schon lang nicht mehr. Ich bin stolz.
Heimautomatisierungsbasisoffensive, Teil 2 – Docker
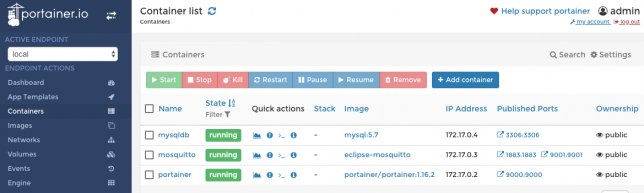
Bei Docker ist auch nicht alles Gold was glänzt, soviel vorab. Also das mit Docker ist so wie mit jedem anderen komplexen System, man muss sich schon etwas damit beschäftigen und es ist am Anfang noch recht unübersichtlich. Deshalb war der Plan eine grafische Oberfläche dafür zu installieren, z.B. Portainer. Wenn man da etwas sucht, findet man auch schöne Anleitungen. Aber irgendwie wollte sich das aktuelle Portainer-Image nicht mit Docker verbinden, zum Kotzen. Gestern wurde dann genau nach dieser Anleitung vorgegangen und wieder nichts! Auf Git habe ich dann den entscheidenden Tipp gefunden und kurzerhand mal eine alte Version installiert:
sudo docker run -d --name="portainer" --restart on-failure -p 9000:9000 -v /var/run/docker.sock:/var/run/docker.sock -v portainer_data:/data portainer/portainer:1.16.2
Genau hier sieht man dann die Vorzüge und Nachteile von Docker – man kann ohne weiteres unterschiedliche Versionen parallel installieren, ist aber bei der Verwendung von fremden Images darauf angewiesen dass die auch fehlerfrei funktionieren. Langer Rede kurzer Sinn: Läuft endlich! Danach dann gleich noch MQTT hinterher, funktioniert auch. Und MySQL auch. Heute steht dann FHEM auf der Agenda, das wird kein Selbstläufer, aber ich bin guter Dinge!